

3D Point Cloud Registration for Localization Using a Deep Neural Network Auto-Encoder
Presented is an algorithm for registration between a large-scale point cloud and a close-proximity scanned point cloud, providing a localization solution that is fully independent of prior information about the initial positions of the two point cloud coordinate systems. The algorithm, denoted LORAX, selects super-points, local subsets of points and describes the geometric structure of each with a low-dimensional descriptor. These descriptors are then used to infer potential matching regions for an efficient coarse registration process, followed by a fine-tuning stage. The set of super-points is selected by covering the point clouds with overlapping spheres, and then filtering out those of low-quality or nonsalient regions. The descriptors are computed using state-of-the-art unsupervised machine learning, utilizing the technology of deep neural network based auto-encoders.
This novel framework provides a strong alternative to the common practice of using manually designed key-point descriptors for coarse point cloud registration. Utilizing super-points instead of key-points allows the available geometrical data to be better exploited to find the correct transformation. Encoding local 3D geometric structures using a deep neural network auto-encoder instead of traditional descriptors continues the trend seen in other computer vision applications and indeed leads to superior results.
The algorithm is tested on challenging point cloud registration datasets, and its advantages over previous approaches as well as its robustness to density changes, noise and missing data are shown.
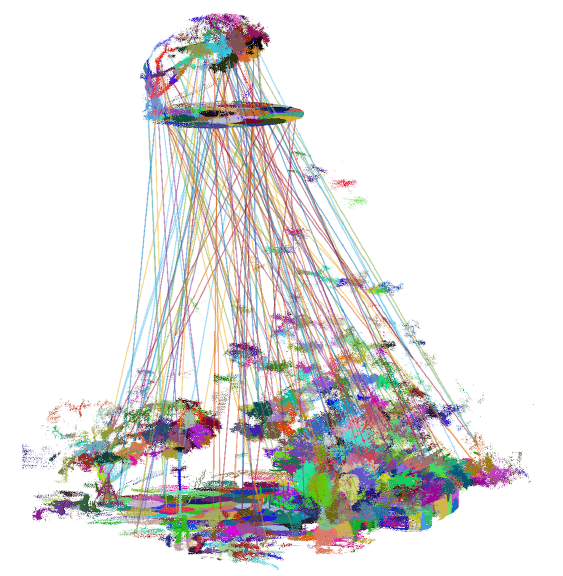 Super-Points pairwise example
Super-Points pairwise example
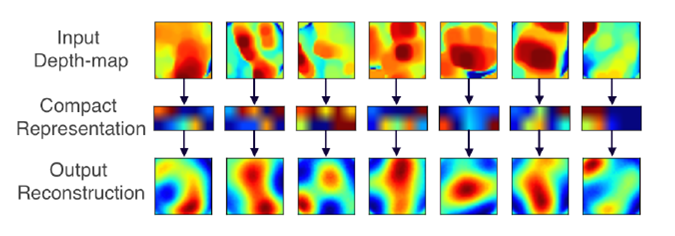
Deep auto-encoder input visualization reduction and reconstruction
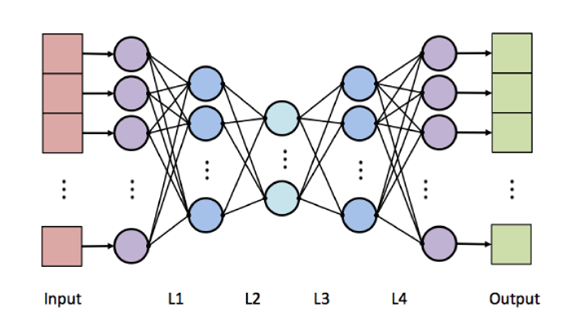
Deep auto encoder architecture