

Filtering outliers and de-noising 3D point clouds using deep-learning techniques
Image processing is the field dealing with variety of challenges of organizing and analyzing data. In practice, there are there main steps: pre-processing the data which transforms the input data to an easy-to-handle representation, preforming an analysis algorithm and extracting the desired information or deriving a conclusion relating to the data. There is a big number of tasks that are utilizing this field, to name a few: object detection in images, image segmentation, medical tests interpretation etc.
Lately, following the tremendous progression of photography technologies, 3D scanning has re-emrged as a leading tool. When obtaining a 3D point cloud using a given scanner, noise is inevitable. In order to achieve good results in different computer vision tasks one needs to overcome this issue. Noise becomes even a bigger problem when trying to apply deep learning algorithms. Since we do not know how exactly the net decision process, we can not anticipate the result that it would yield for noisy data.
In this project we would like to focus on the pre-processing step and propose a new method for filtering a point cloud of a scanned object. The filtering will be performed using the state-of-the-art learning techniques.
 Fig. 1: an example of a 3D point cloud corrupted with both oultliers and noisy samples.
Fig. 1: an example of a 3D point cloud corrupted with both oultliers and noisy samples.
(image taken from https://arxiv.org/abs/1901.01060)
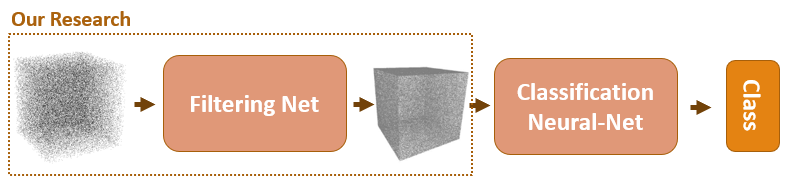 Fig. 2: research approach block diagram
Fig. 2: research approach block diagram