

Human Motion Prediction using Learning Method for Human-Robot Collaboration in Assembly Tasks
In the design of industrial assembly environments, robots carry out many of the physical, repetitive or unsafe tasks while the human worker performs higher complex manual tasks up or downstream. Furthermore, manufacturing companies facing high demand for customized and personalized products require flexible assembly capabilities which consequently dictate the use of Collaborative robots (Cobots). Therefore, there is a need for a real time analysis that will lead to an optimal and adaptable robot-worker cooperation. According to the recent advanced technology of sensors and cameras, spatial data can be captured and analyzed in real time. In this work, the focus is on the development of a learning method for human motion prediction, and the use of the results to plan an optimal trajectory for the Cobot. The method is applicable to multi-task missions for both the human and the robot simultaneously. In the offline phase, human motion data (skeletal pose information as well as 3D model) is gathered while performing set of tasks. This data is used for the construction of Gaussian Mixture Models (GMM) library and the calculation of Human probabilistic occupancy volumes for each task class. Those models are used for early task recognition and human motion prediction in the online phase. A synthetic simulation environment was created to validate the learning method. In addition, the method was applied on existing human arm reaching motions into two items on a table. The results show 80% recognition accuracy after 20% of the human motion was observed. The Cobot obstacle map is updated according to the task recognition results and the appropriate Human probabilistic occupancy volume. Cobot task priority is to execute the one that minimize the probability for interference with the human worker along the Cobot motion.
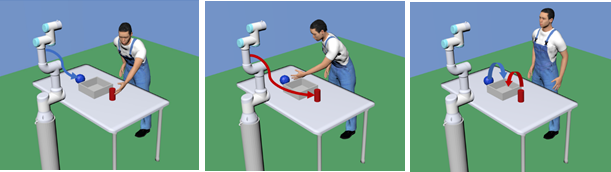
Figure 1 – Synthetic workspace environment in Blender animation software.
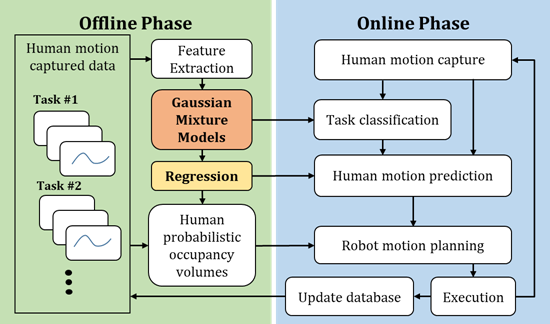
Figure 2 – Data processing schematic diagram of the proposed approach for human-robot collaboration.