

Design and Motion Planning of Multi-Robot Assembly Cells for
Body-in-White Spot Welding
Supervisors: Prof. Tullio A.M. Tolio, Prof. Anath Fischer
Co-Supervisor: Eng. Ph.D. Lorenzo Molinari Tosatti
Tutor: Prof. Gianpiero Mastinu
The number of industrial robots worldwide is constantly increasing. According to the International Federation of Robotics (IFR), the number will reach 1,575,000 units by the end of 2015. Many of these industrial robot installations (36% of new installation in 2011) are related to the automotive sector and to multi-robot cells for body spot welding. Multi-robot cells for spot welding are robotic cells in which several parts are assembled by spot welding. They are characterized by deferent robots working at the same time on a single body that is handled by a transporter. The body is generally composed of two or more components that are blocked during the welding process by ad-hoc fixtures. The design of the multi-robot cell for spot welding relies on two main steps: cell design and offline multi-robot motion planning by simulation software. Given the fixture, the body and the welding points, cell design concerns the selection of the resources, such as robots and welding guns, and their displacement in the space cell while considering productivity, costs, flexibility and re-configurability. Motion planning concerns the allocation of the welding points to the resources, i.e. a robot and its welding gun, and the definition of a motion plan for each robot so that the body is correctly assembled to cope with cycle time and avoid collisions between the robot and the fixture or among robots. Currently, cell design and motion planning are sequential activities and are generally managed from different industrial functional units. Due to these activity subdivisions, several cycles are needed for obtaining a feasible final solution. However, each cycle causes delays and errors that could be avoided through better integration of these activities. The proposed approach aims at defining a methodology for optimizing cell design while reducing time and error due to the lack of integration between the design and the motion planning. The idea is to exploit existing motion planning techniques in order to define a new cell design approach that is highly integrated with motion planning. The research examined with the following topics: cell design, motion planning for single-robot cells, motion planning for multi-robot cells, collision detection and multi-resolution simulation. It has been expected that the outcome of this research will develop into a computerized approach for the simultaneous resolution of cell design and motion planning based on multi-resolution simulation. The module has been expected to reduce design time and human effort during these stages.
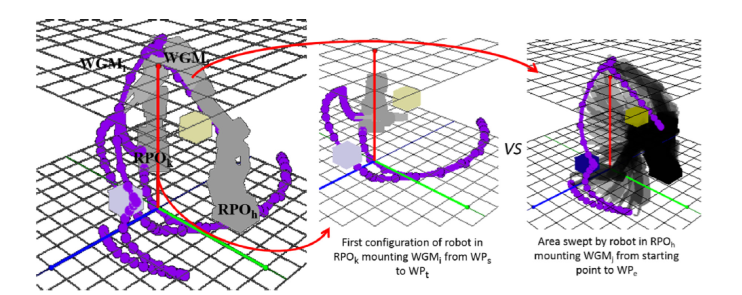 Figure 1: Volume swept-like algorithm
Figure 1: Volume swept-like algorithm

Figure 2: Multi-Robot cell motion volume