

Alignment of 3D scanned objects using learning methods on Point Cloud
Analysis of scanned 3D objects is an important task for variety of applications. In computer aided design (CAD) it can be helpful in the reverse engineering process where a CAD model is reconstructed from a scanned object. It can also be used, combined with prior detection and classification, to understand a scene and reconstruct it for robotics or virtual reality applications.
With increasing computational power and image databases, learning methods have managed to achieve good results in common computer vision tasks such as classification and segmentation.
However, the analysis of 3D objects using learning methods, is relevant to many different approaches and is encountered with different challenges. The approaches differ by the input type (2D images, 3D point cloud, voxel based etc.), the methods that are used to compute the analysis, the complexity and so forth.
This research aims to perform analysis of scanned 3D Objects using learning methods. The analysis process inherently includes acquisition and preparation of the data and construction of suitable learning method.
A thorough research is done prior to the practical work, in order to understand deeply the learning field in general and the 3D data analysis in particular.
The problem we deal with in this research is how to identify correspondence between two point clouds, one of a model and one from scanned data. Hence how do we recognize that they represent the same object and to derive the position of one such point cloud in respect to the other point cloud. The research engages challenges that are in the heart of the three-dimensional data learning field, such as how to design the whole algorithm, how to design informative descriptors and how to find shape correspondence given a descriptor.
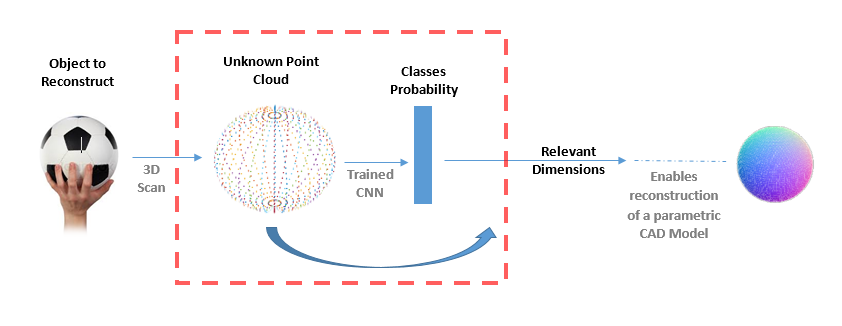 Fig. 1: 3D reconstruction process
Fig. 1: 3D reconstruction process
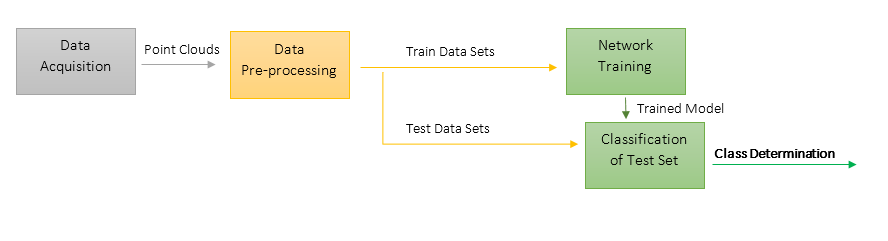
Fig. 2: Solution approach flow chart